Free translation: EP0451783A2
Design for Torque Recovery of a Turbocharged Combustion Engine
After an ASR Intervention.
Abstract
To achieve torque recovery after an ASR intervention as fast as possible, existing components [301, KFFUPSRL] use a given load demand-value [rlsol] to generate an intake manifold pressure demand-value [pssol] that is used, via at least one map [KFVPDKSD, KFPDKSE], to derive a ratio [vpsspls] of the intake [pssol] to boost [plsol] demand-pressures. Additionally, existing components [304, …, 309] change this ratio, delivered by at least one map [KFVPDKSD, KFPDKSE], to a lower value for dynamic driving than for steady driving, and cause a gradual increase to a higher value at the end of dynamic operation. During an ASR intervention, the existing components [304, …, 309] set the same pressure ratio [vpsspls] as for dynamic driving.
Description
State of the art
For anti-slip control [ASR] the engine torque is usually lowered. On a turbocharged engine this happens through an intervention into the boost control, whereby the boost pressure demand-value is appropriately reduced. The torque reduction happens quickly compared to the subsequent recovery. This invention addresses an arrangement for rapid torque recovery after an ASR intervention in a turbocharged combustion engine.
Advantages of the invention
The aforementioned task will be accomplished according to the criteria of Claim 1 by using the existing system to generate from a given load demand-value an intake pressure demand-value, and to derive from that a pressure ratio of intake demand-pressure to boost demand-pressure using at least one map. This pressure ratio equals the pressure ratio across the throttle plate. Additionally, the existing system reduces this pressure ratio to a lower value for dynamic driving than for steady driving and, at the end of dynamic driving, causes the gradual transition from the lower to a higher pressure ratio. In an ASR intervention, the system sets the same pressure ratio as for dynamic driving.
For torque recovery in according with this invention, an arrangement is used that is already available for another function, namely the switching between the two operating modes of dynamic and steady driving. Therefore, separate switching means for torque recovery after an ASR intervention are not required. Moreover, the arrangement according to this invention has the advantage that it recovers torque very rapidly after an ASR intervention. Because the change to a smaller pressure ratio counteracts the reduction of the boost demand-value, the torque reduction is essentially done by the throttle plate. At the end of an ASR intervention, the higher demand torque can now be restored much more spontaneously via the throttle plate, because the boost pressure had only been reduced slightly thus requiring notably less restoration.
Further advantageous developments of the invention arise from the sub-claims. Accordingly, the pressure ratios for dynamic and steady driving will be generated in one or more maps dependent on engine speed and intake manifold demand-pressure. Preferably, one map makes ready the pressure ratio for dynamic driving while another map prepares the pressure ratio for steady driving.
The system that switches between the pressure ratios for the different operating modes consists of an OR gate at whose inputs presence of at least one bit signals dynamic driving with a logic 1 and presence of another bit signals an ASR intervention with a logic 1.
The output signal of the OR gate drives a circuit that sets the pressure ratio. For a logic 1, the pressure ratio for dynamic driving is set from the single or first map. Upon OR gate output change from logic 1 to logic 0, the pressure ratio for dynamic driving is gradually changed, according to a specified time constant, to the pressure ratio for steady driving, derived from the single or second map.
Description of an Implementation Example
The following further explains the invention with the figures:
Fig. 1 - Block diagram showing the control of a combustion engine
Fig. 2 - Block diagram for the control of throttle plate position and boost pressure control.
Fig. 3 - Block diagram showing the generation of a boost pressure demand-value
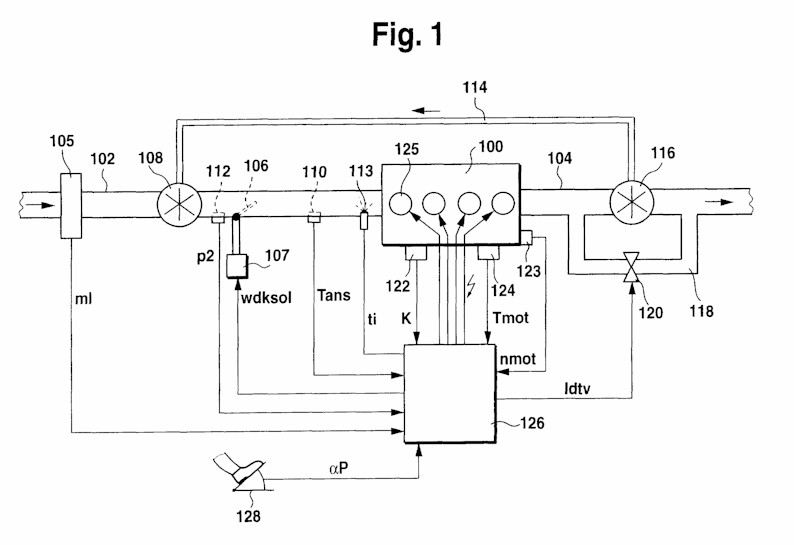
Figure 1 shows a combustion engine [100] with an intake tract [102] and an exhaust path [104]. In the intake tract are arranged – seen in air flow direction – a metering sensor [105] for air mass [ml], a compressor [108] of a turbocharger, a pressure sensor [112] for boost pressure [p2], a temperature sensor [110] for the temperature [Tans] of the air ingested by the engine [100], and one or more injection jets [113]. The compressor [108] is driven via a drive connection [114] by a turbine [116] positioned in the exhaust path [104]. A bypass passage [118] bridges the turbine [116]. A bypass valve [120] is located in the bypass passage [118], whereby the boost pressure generated by the turbocharger can be controlled. Also attached to the combustion engine [100] are a knock sensor [122] that issues a knock signal [K] during knocking combustion, an engine speed sensor [123] for engine speed [nmot], and a temperature sensor [124] for engine temperature. The combustion engine [100] in this example has four cylinders [125], each equipped with one spark plug.
The following signals are supplied to a control module [126]: The signal from the air mass flow meter [105], the signal [p2] from the pressure sensor [112], the signal [Tans] from the temperature sensor [110] for the temperature of the ingested air, the signal [K] from the knock sensor [112], the signal [nmot] from the engine speed sensor [123], the signal [Tmot] from the engine temperature sensor [124] and the signal [ P] from a driver pedal position transducer [128]. Outputs from the control module [126] are a signal [wdksol] for the servomotor [107] of the throttle plate [106], a signal [ldtv] for control of the bypass valve [120] and a signal [ti] for fuel metering through the injection nozzles [113]
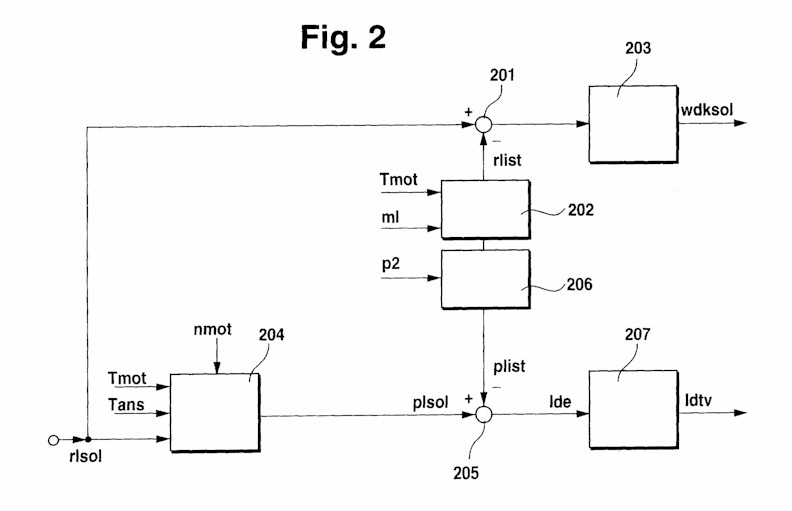
The control module [126] contains the circuit shown in fig. 2 for the control of throttle plate position and boost pressure. The input signal for the control circuit shown in fig. 2 is a load demand-value [rlsol] which is calculated from a torque demand-value under various influences, i.e. driver pedal position, vehicle speed regulation, transmission control, anti slip regulation. Since the derivation of the load demand-value [rlsol] is not a matter of this invention, it will not be further discussed here.
The load demand-value [rlsol] is directed to a junction [201] where the output is determined by a load actual-value [rlist]. The load actual-value [rlist] (also known as engine load) is determined in a processor [202] dependant on engine speed [nmot] and intake air mass flow [mL]. From the buffered demand- and actual- load values, a load controller [203] derives the control signal [wdksol] for the throttle plate positioning motor [107].
Also derived from the load demand-value [rlsol] is the control signal [ldtv] for the bypass valve [120] that regulates the boost pressure. For that, the load demand-value is directed to a processor [204] that is further discussed in connection with Fig. 3. In this processor a boost pressure demand-value [plsol] is derived from the load demand-value, dependent on engine speed [nmot], engine temperature [Tmot] and the intake manifold air temperature [Tans].
In a junction [205] the output is determined between the boost pressure demand-value [plsol] and the boost pressure actual-value [plist]. A processor [206] derives the boost pressure actual-value [plist] from the pressure signal [p2] of the pressure sensor [112]. The output signal [lde] from the junction [205] is directed to a boost pressure regulator, i.e. PDI-regulator [207] that finally supplies a positioning value [ldtv] for the bypass valve [120].
As described below, a boost pressure demand-value [plsol] is generated by the processor [204] detailed in Fig. 3, dependant on whether a dynamic or steady driving condition exists and whether an ASR intervention was activated.
Initially, an intake manifold pressure demand-value [pssol] is created in a divider [301] by division of the load demand-value [rlsol] with a factor [fupsrl]. The factor [fupsrl] can be derived from a map [KFFUPSRL] dependant on engine speed [nmot], engine temperature [Tmot], and the intake manifold temperature [Tans]. A divider [302] generates a pressure ratio [vpsspu] of the intake manifold pressure demand-value [pssol] and the atmospheric pressure [pu]. This pressure ratio [vpsspu] and the engine speed [nmot] are directed to a first map [KFVPDKSD] and a second map [KFVPDKSE]. Depending on these two input values, the two maps generate different pressure ratios [vpsspls] of the pressure demand-values for intake manifold and boost.
This pressure ratio [vpsspls] equals the pressure ratio across the throttle plate, whereby the first map [KFVPDKSD] delivers a pressure ratio [vpsspls] in the dynamic driving mode and the second map [KFVPDKSE] delivers a pressure ratio [vpsspls] in the steady driving mode. In the dynamic mode, the pressure ratio [vpsspls] from the first map [KFVPDKSD] is switched through, and in the steady mode the pressure ratio [vpsspls] from the second map [KFVPDKSE] is switched through. The pressure ratio [vpsspls] for the dynamic mode is lower than the pressure ratio [vpsspls] for the steady mode.
Now, if the pressure ratio [vpsspls] is divided by the intake manifold pressure demand-value [pssol] by a divider [303], the outcome in the dynamic mode is a higher boost pressure demand-value [plsol] and a smaller throttle plate angle than in the steady mode. Thus, the boost pressure demand-value [plsol] is raised relative to the intake manifold pressure demand-value [pssol] and the throttle plate is partially closed when the driver demands dynamic engine performance and good drivability is required. In this driving mode, the engine has bad efficiency and does not operate economically. However, if good efficiency is demanded, namely in steady operation, then the boost pressure demand-value [plsol] is lowered until it corresponds approximately to the intake manifold pressure demand-value [pssol]. At the same time, the throttle plate is opened fully. Thereby, rapid engine adaptation to particular driving modes is possible.
Switching between the two maps [KFVPDKSD and KFVPDKSE] to the appropriate pressure ratio [vpsspls], favorable to the particular operating mode, is done by a control signal [fmvp] that is generated in the processor [304]. For instance, if the driver signals a dynamic driving mode via a pedal input, expressed by a bit [B_ldob] for overboost being set to logic 1 (or the post-overboost lock-out bit [B_ldobsp] is still set to logic 1), then an OR gate [305], at who’s input the two bits [B_ldob and B_ldobsp] are positioned, releases a logic 1 to the processor [304]. When the output of OR gate [305] is set to logic 1, the processor [304] sets its control signal [fmvp] to a value of 1.0.
This control signal [fmvp] is multiplied on the one hand by the output signal of the first map [KFVPDKSD] in a multiplier [306], and on the other hand, after difference determination with the value 1.0 in junction [307], it is multiplied with the output signal of the second map [KFVPDKSE] in a multiplier [308]. Now, if the control signal [fmvp] has the value of 1.0 then the output signal of the second map [KFVPDKSE] is multiplied with the value 0.0 and the output signal of the first map [KFVPDKSD] is multiplied with the value 1.0. In this case the output of the junction [309], in which the output signals of the multipliers [306] and [309] are added, becomes the pressure ratio [vpsspls] for dynamic driving from the first map [KFVPDKSD].
In a transition from dynamic to steady driving, the two bits [B_ldob and B_ldobsp] change their state from logic 1 to logic 0, so that the output of OR gate [305] becomes a logic 0. Then the processor [304] reduces its control signal [fmvp] gradually with a time constant [TDPDK] from its maximum value of 1.0 to its minimum value [FDPDKMN = 0.0]. Thereby the output signal of the first map [KFVPDKSD] is gradually reduced to the value of 0.0 and at the same time the output signal of the second map [KFVPDKSE] is gradually increased from 0.0 to the full value of the pressure ratio [vpsspls] for steady operation. Therefore the transition from the pressure ratio [vpsspls] for dynamic operation to a pressure ratio for steady operation occurs not suddenly but gradually.
The aforedescribed arrangement for the determination of boost pressure demand-values [plsol] for the two operating modes, dynamic driving and steady driving, is also used for recovery of engine torque after an ASR intervention. For that, a bit [B_asr] is simply placed at an additional input to OR gate [305] that assumes the state of logic 1 when an ASR intervention occurs. When the ARS intervention is cancelled, the gradual change of the control signal [fmvp] from value 1.0 to 0.0, immediately after the ASR intervention, resets the pressure ratio [vpsspls] from the first map [KFVPDKSD] for dynamic driving. That means that torque recovery occurs very rapidly because of the high initial value of the boost pressure demand-value [plsol].
Because the change to a smaller pressure ratio counteracts the reduction of the boost demand-value, the torque reduction is essentially done by the throttle plate. At the end of an ASR intervention, the higher demand torque can now be restored much more spontaneously via the throttle plate, because the boost pressure had only been reduced slightly thus requiring notably less restoration.
Instead of two separate maps KFVPDKSD and KFVPDKSE both functions can also be combined in a single map.
Claims
1. Arrangement for torque recovery of a supercharged combustion engine after an ASR intervention, thus characterized that first means [301, KFFUPSRL] exist that build an intake pressure demand-value [pssol] from a given load demand-value [rlsol] and there from derive, via at least one map [KFVPDKSD, KFVPDKSE], a pressure ratio [vpsspls] of an intake pressure demand-value [pssol] to a boost pressure demand-value [plsol], and that second means [304, …, 309] exist that, during dynamic driving, switch to a pressure ratio [vpsspls] delivered by the at least one map [KFVPDKSD, KFVPDKSE] that is less than in steady operation, and that, at the end of dynamic driving, cause a gradual transition from the lower pressure ratio to a higher pressure ratio, and that the second means [304, …, 309], after an ASR intervention, put through the same pressure ratio [vpsspls] as for dynamic driving.
2. Arrangement according to Claim1, thus characterized that the at-least-one map [KFVPDKSD, KFVPDKSE] generates the pressure ratio[vpsspls] for dynamic as well as steady driving dependent on the engine speed [nmot] and the intake manifold pressure demand-value [pssol].
3. Arrangement according to Claim 1 or Claim 2, thus characterized that a first map [KFVPDKSD] makes available the pressure ratio [vpsspls] for dynamic driving operation and a second map [KFVPDKSE] makes available the pressure ratio [vpsspls] for steady driving operation.
4. Arrangement according to Claim 1 or 3, thus characterized that the second means [304, …, 309] feature an OR gate [305] at whose inputs at least one bit [B_ldob, B_ldobsp] is available to signal dynamic driving with a logic 1, and a second bit [B_asr] is available to signal an ASR intervention with a logic 1, and that the output signal of the OR gate [305] controls a processor [304] which, for a logic 1 at the output from the OR gate [305], puts through the pressure ratio [vpsspls] for dynamic driving from the at-least-one or first map [KFVPDKSD], and which, during transition from a logic 1 to a logic 0 at the output of OR gate [305], gradually, with a give time constant [TDPDK], switches over from the pressure ratio [vpsspls] for dynamic driving to the pressure ratio [vpsspls] for steady driving from the at-least-one map or the second map [KFVPDKSE].